Friction isn’t just something you encounter on internet message boards its central to our success! Now, I’ve been assuming the mecanum wheels of my imagination will grip to the sphere like a baby gorilla to her mother but remember, when you ASS-U-ME, you make an Ass of U and Me!
The castor wheels will bear the weight of the user and sphere and the motors will be heavily spring loaded to push the mecanum wheel onto the sphere. The mecanum rollers should be made of rubber, not plastic to better contact area. We might need to manufacture them with a softer, squishy rubber too but this might cause them to wear out a lot quicker. I would also consider making the finish on the outside of the sphere quite rough for better adhesion too.
The friction requirements also vary depending on the weight of the user and the sphere, lighter means the platform can move more easily. Normally when something requires more grip you can use a belt or track but since we’re moving a sphere this isn’t possible if we want to keep 3DOF. We could use a belt attached to the 4 side points of the sphere but then we’d lose the yaw or rotation. Whether this is an acceptable compromise is unclear, but provides another alternative.
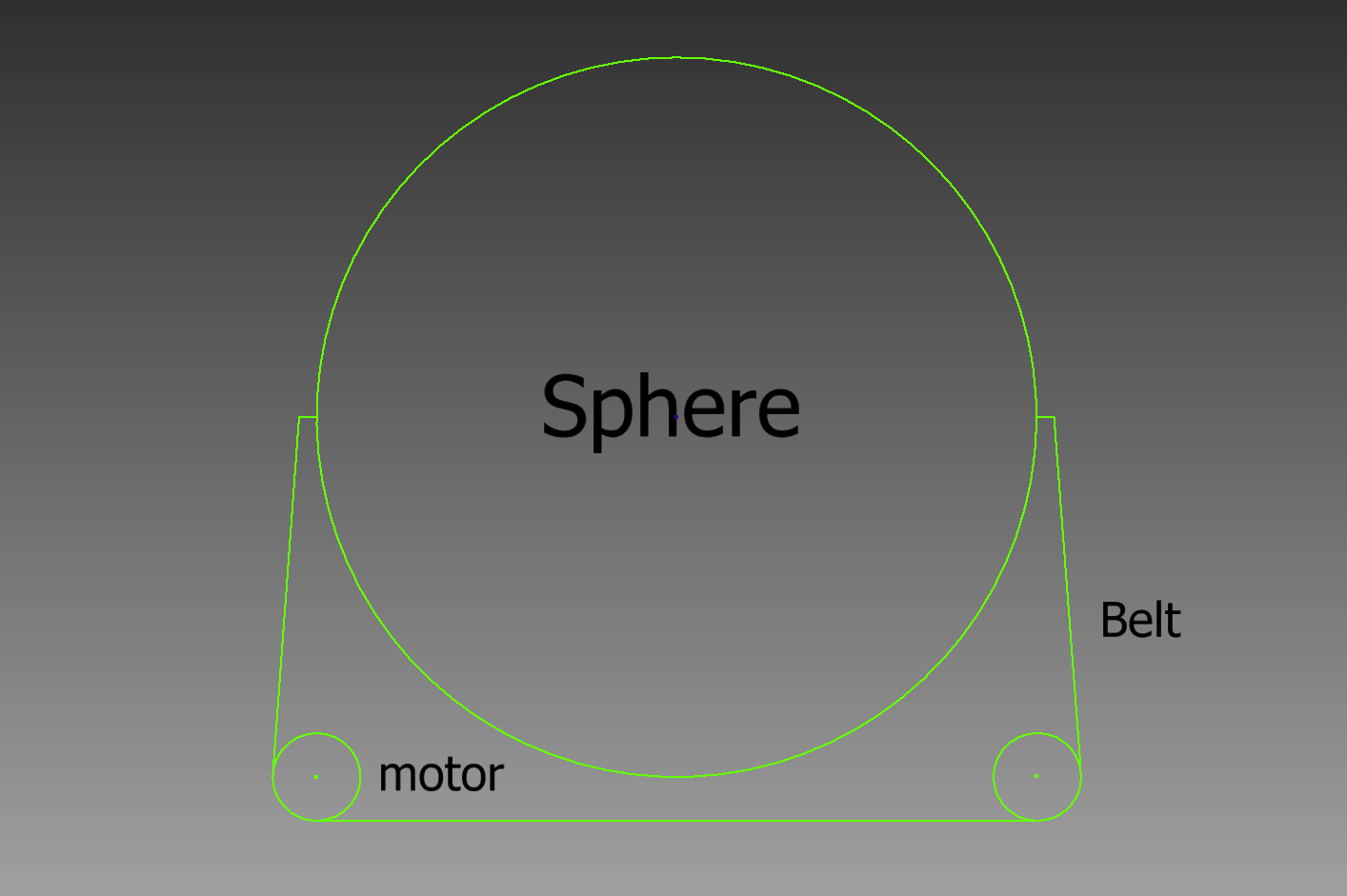
In this side view we use a belt for better traction and when the motors turn the sphere would be pitched backwards or forwards. The motors are in front and behind. If we have another set on the sides they can control roll. Please tell me if this isn’t clear an I’ll whip up a quick 3D model.
Hiding all the engineering makes the project look a lot better though, but we still have another potential solution if mecanum wheels just didn’t work. This means though that a half sphere is the minimum size and adding more panels will not increase our total pitch and roll. The belts would impose a limit. No chance for inverted spheres :p
A simpler solution for more grip is to add more wheels, but since these are mechanically complex, not so affordable. I have seen some cheaper ones for about $6 each however so adding more to overcome this critical issue isn’t going to destroy the project, and since they’re not required to bear a significant load can be ‘under engineered’.
Thoughts? Feedback? Please comment

Could you use gears instead of wheels? Have groves in the sphere and have the gear guide on thous and you’d have a controlled movement have like an electric bicycle setup.
No.
The only way a system with teeth would work would be if we’re only rotating in one direction. If we want to move in 3 directions the only solution for a sphere is with mecanum or omni wheels. We can use a belt attached to the two axis to turn the sphere, but this means we lose the rotation.